Arm Announces Neoverse N1 & E1 Platforms & CPUs: Enabling A Huge Jump In Infrastructure Performance
by Andrei Frumusanu on February 20, 2019 9:00 AM ESTN1 Hyperscale Reference Design
A big part of what is defining the N1 Platform as an actual platform, is the fact that Arm is offering a full reference design with a set of IPs that is fully validated by Arm themselves.
Here we see three reference designs, a Neoverse N1 hyperscale design, which we’ll get into more detail shortly, an N1 edge design, and a Neoverse E1 edge design. Arm’s goals with the reference designs is to give vendors “sweet-spot” configuration options that they will then be able to implement with (relatively) minimal effort.
The N1 hyperscale design is what we’ll be covering in more detail as this represents Arm’s most cutting-edge and competitive product.
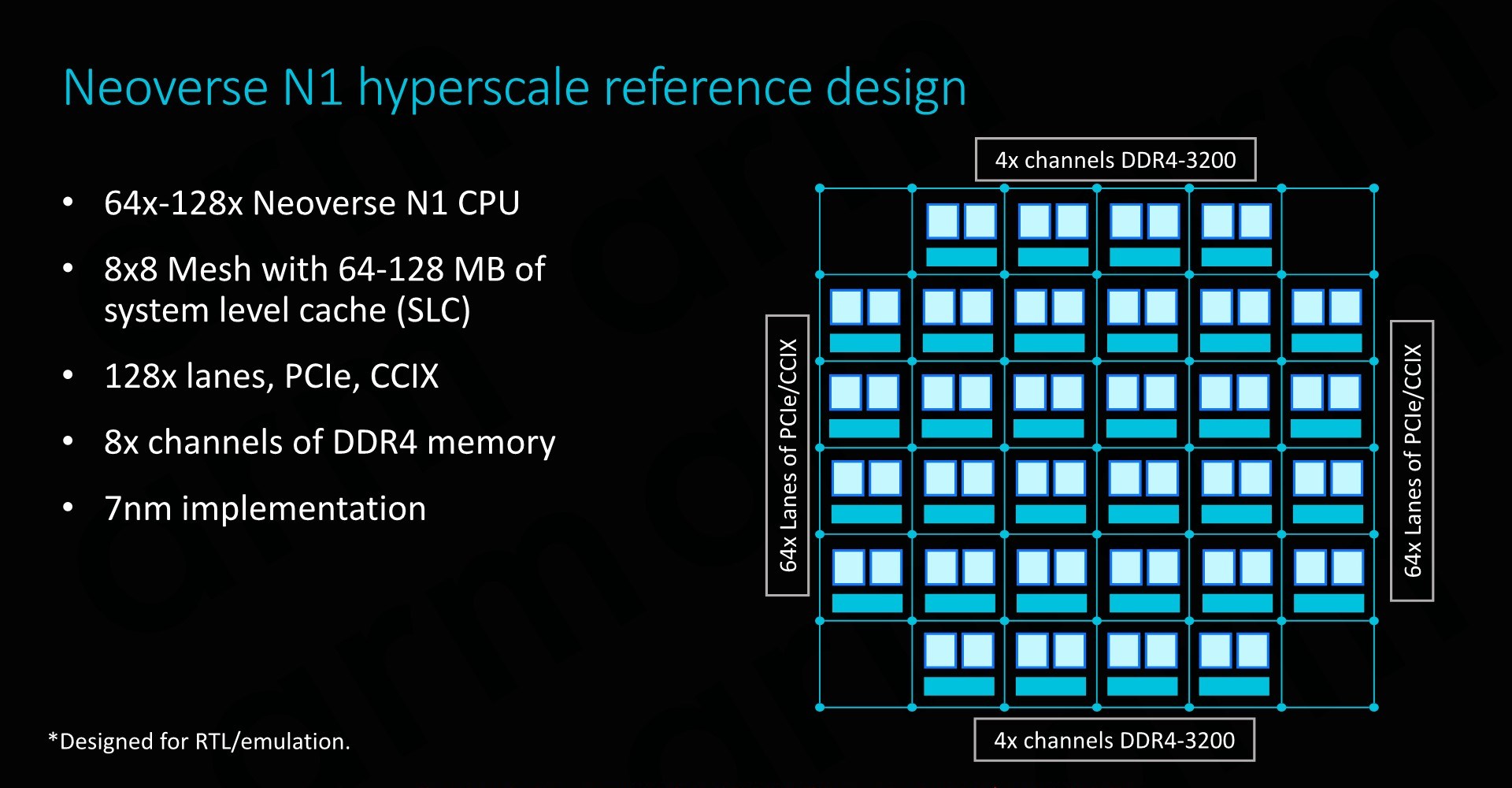
As covered on the previous page, at the heart we find the Neoverse N1 CPU in either 64 or 128 core configurations, integrated in a CMN-600 mesh network with either 64 or 128MB of SLC cache. We also see 128 lanes for PCIe 4 respectively CCIX interfaces which provide plenty of I/O bandwidth.
In terms of memory controllers, Arm employs 8x DD4 interfaces up to 3200MHz. Arm actually has abandoned development of its own memory controllers as customers in most cases opted for their own in-house designs or rather opted to choose IP from other third-party vendors such as Cadence or Synopsys. For the current reference designs Arm’s own DMC-520 was still up-to-date and a well-understood block for the company, although in the future newer memory controllers such as for DDR5 will have to rely on third-party IP. Naturally, the reference design targets the latest 7nm process node.

The physical implementation of the SoC would use replicable hierarchical building blocks for ease of design. A “CPU Tile” consists of the two N1 CPU cores, a slice/bank of the SLC cache as well as part of the CMN’s cross points and home-nodes. This CPU Tile is replicated to generate a “Super Tile”, what is added here is peripheral parts of the SoC such as I/O as well as memory controllers. Finally, replicating the super tile in flipped and mirrored implementations results in the final top-level mesh that is to be implemented on the SoC.
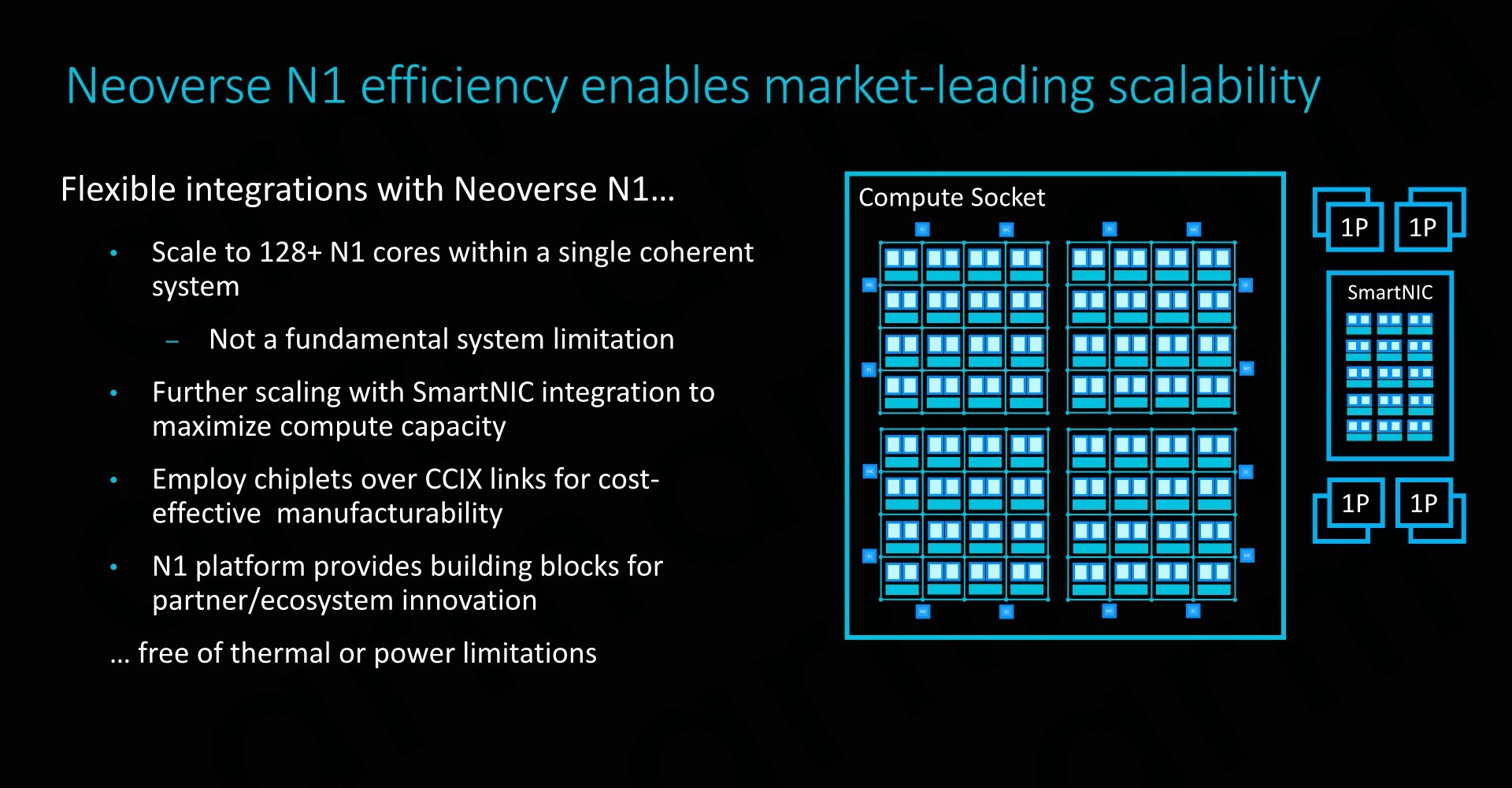
Scaling the design to 128 cores doesn’t represent an issue for the IP, although we’ll be hitting some practical limits in terms of current generation technology. Arm’s 64 core N1 reference design with 64MB of cache on a 7nm process node would result in a die size a little under 400mm², which probably is on the higher end of what vendors would want to target in terms of manufacturability. To alleviate such concerns, Arm also took a page out of AMD’s book and floated the idea of chiplet designs, where each chiplet would communicate over CCIX links. Inherently it’s up to the vendor to decide how they’ll want to design their solution, and Arm provides the essential building blocks and flexibility to enable this.
SmartNIC integration capability is also an important aspect of the design and its flexibility. To maximise compute capacity in large scale system, having accelerated network connectivity is key in actually achieving high throughput in the densest (and efficient) form-factor possible.
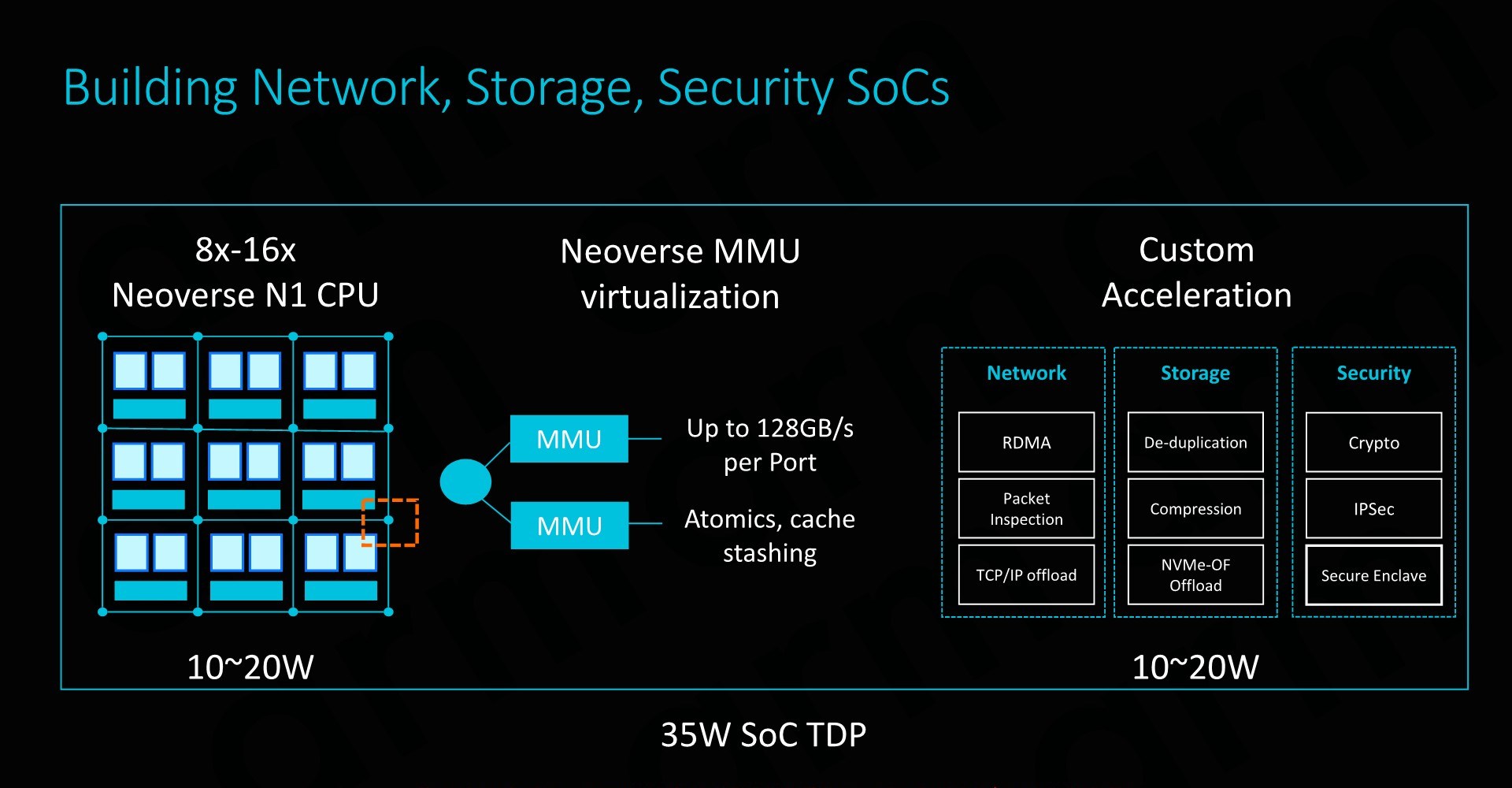
The CMN-600 allows for slave ports on its crosspoints: Here we can see MMUs connected with high bandwidth interfaces of up to 128GB/s. Attaching fixed-function hardware offloading IP thus would be extremely easy to implement.
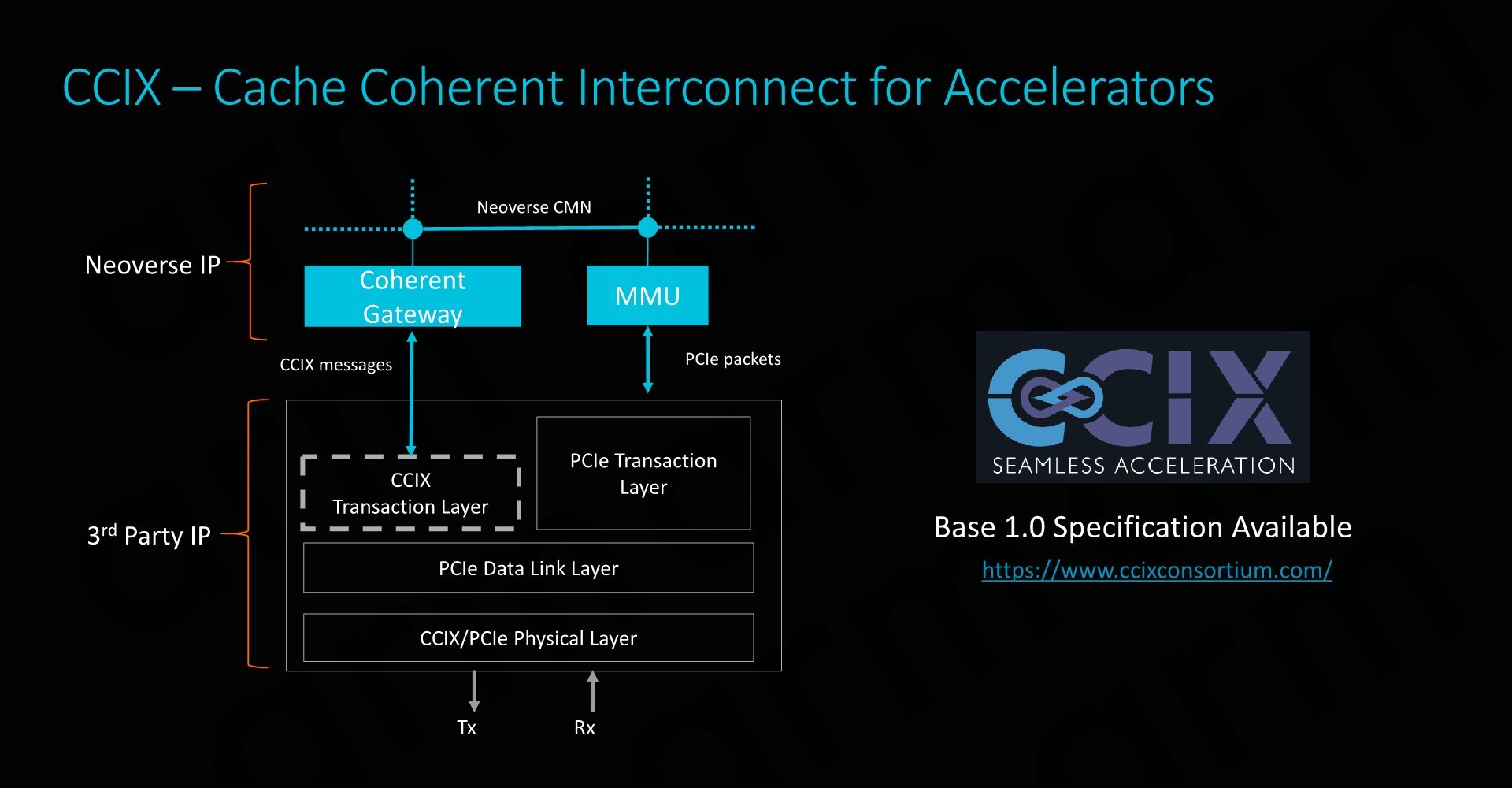
CCIX is extremely important for Arm as it enables its product portfolio to integrate with third-party IP offerings. Enabling cache coherency for external IP blocks is an incredibly attractive feature to have as it massively simplifies software design for the vendors. Essentially what this means is that software simply sees a single huge block of memory, whereas non-coherent systems require drivers and software to be aware and track what part of memory is valid and what isn’t. In terms of IP integration, Arm provides the CCIX coherent gateway that integrates with the CMN-600, while on the other side it’s the onus of the third-party IP provider to provide the CCIX translation layer.
Currently Xilinx will be among the first vendors to offer CCIX-enabled end-products in Q3 2019. With AMD also fully embracing CCIX, there’s some very exciting future potential for third-party accelerator hardware, and we be seeing new use-cases that just weren’t feasible before.
Power/Performance management
While it’s a bit weird to talk about power management in the context of implementation scalability (The average reader might think of it as a thermal/cooling consideration), there’s some very interesting implications in terms of how Arm simplifies the work needed to be done by the vendor.
Along a chip’s logical design, a vendor must also implement a power delivery network that will be able to adequately support the IP. In real-world use-cases this means that the PDN needs to be as robust as to deal with the worst-case power scenario of a component. This is actually quite a headache for many vendors as the design requires complex models and in most cases the PDN will need to be over-engineered in order to offer guarantees of stability, which in turn raises the complexity and cost of the implementation.
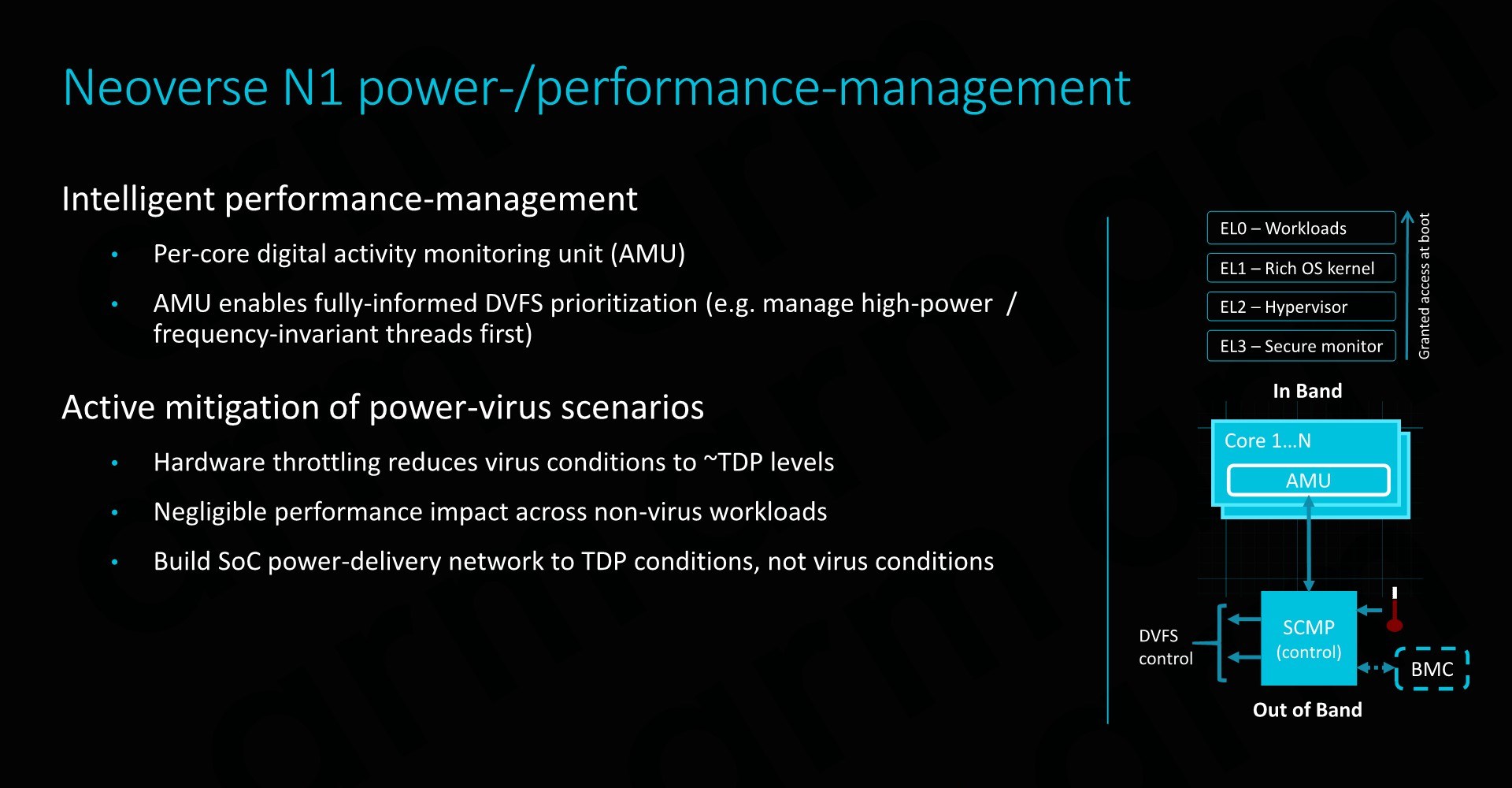
Arm seeks to alleviate these concerns by offering extremely fine-grained DVFS mechanisms in the form of a dedicated micro-controller. The controller access detailed activity monitoring units inside the CPU cores, seeing what actual blocks and how many transistors are actually actively switching, and feeding this information back to the system controller to change DVFS states. This provides a certain level of hard-guarantee as to when the CPU enters power-virus-like workloads which can cause current spikes, and avoid them in time. This enables vendors to design their PDNs to more conservative tolerances, saving on implementation cost.








101 Comments
View All Comments
lightningz71 - Thursday, February 21, 2019 - link
This is one I can answer. My computer engineering professors fielded this exact question. Essentially, when profiling code that was being used in modern software, the major CPU vendors realized that a small portion of the x86 instructions were rarely used. So rarely, in fact, that it was an absolute waste of silicone to try to implement them in hardware as it would be so rarely used. Add in that a lot of those instruction are not executed in isolation, but have some sort of dependency on fetching a piece of data, or waiting on the resolution of multiple intermediary steps during their execution, that going with full hardware implementations would not have resulted in a major boost in their performance. Instead, they elected to implement them in micro-code and execute them on the highly tuned circuits that they used to implement the more common instructions in the back end. So, while you loose some performance having to load and run the microcode sequences, its actually executing those simplified sub-instructions very rapidly, and can do other things while waiting for various tasks to complete.so, while there is a case to be made that a full, tuned and optimized hardware implementation of the more complex instructions can be done, and perform more quickly than the micro-code sequences, the actual speedup for the overall performance of the systems in question would be minimal because of how rarely those actual instructions are used in practice. You're talking about shaving off a few tens of cycles per instance on a processor that is running at around 4Ghz these days. The real performance impact would be minimal, but the development cost and circuit budget consumed would be significant for not much gain.
FunBunny2 - Thursday, February 21, 2019 - link
"Essentially, when profiling code that was being used in modern software, the major CPU vendors realized that a small portion of the x86 instructions were rarely used. "not to do too much what-about-ism, but IBM was doing that with COBOL applications, in real time monitoring (allowance to do so was embedded in the lease agreement), at least as early as the 360.
naturally, I didn't remember that lower brain stem memory until reading your comment. my shame. (:
but... I do wonder about all those 'extensions' to the original 8086 instruction set. weren't they created to support 'necessary' functions? here: https://en.wikichip.org/wiki/x86/extensions
or are they, too, not used enough?
Wilco1 - Thursday, February 21, 2019 - link
Well when did you last use MMX? Or x87 floating point? There are large numbers of instructions which are hardly ever used.FunBunny2 - Thursday, February 21, 2019 - link
HLL coders don't, at least directly. but I'm old enough to remember when adding a '87 (before FP was moved to the '86) put a rocket under 1-2-3.Wilco1 - Thursday, February 21, 2019 - link
The point is both have been superceded by all the SSE variants which itself is now being replaced by AVX. Intel has posted patches to change HLL MMX intrinsics to use SSE instructions instead of MMX.zmatt - Wednesday, February 27, 2019 - link
Usually you don't invoke those yourself. The compiler does.nevcairiel - Wednesday, February 20, 2019 - link
The desktop and notebook market will face adoption problems simply from having your software run (fast). Of course they can use emulation layers, but that once again costs you efficiency/performance.Mobile was an entirely new space, so no pre-existing software to really worry about, and servers are a far more managed space so that software is often more readily available in the variants you need. Desktop usages on the other hand are full of legacy software that has to work.
ZolaIII - Wednesday, February 20, 2019 - link
In it's core (integer base instruction set) it is more efficient but that doesn't mean much nowadays. Main factor is design of actual core as such.ballsystemlord - Wednesday, February 20, 2019 - link
But, and here's the kicker, the binary nature of proprietary SW means that switching arches will require many fixes to programs and many more will never be ported. Emulation, which is slow for CPU arches, is the only way that such SW could continue to exist.Gee, Stallman was wright!
wumpus - Thursday, February 21, 2019 - link
Put it this way: the effective means to convert a "CISC" architecture to internally* "RISCY" operation could be included on a CPU core effectively in the mid 1990s. This pipeline step is sufficiently small to make no difference nowadays (although Sandy Bridge and later use caches to store pre-decoded micro-ops). The RISC/CISC wars died a long time ago, and now we only have Intel vs. ARM vs. AMD (and don't forget IBM).* (Internally RISC). Oddly enough, the more "internally RISCy" a 1990s-era chip was the less successful it was. The AMD K5 was internally a 29k derivative (a real RISC) and failed miserably. Supposedly IBM had a PowerPC/X86 hybrid that never made it out of the lab. Transmeta did its translation in software, but fell into the "single device power trap". Nextgen was probably more successful than all of these (especially in convincing AMD to buy them and producing the mighty Athlon), and had the ability to execute native code (supposedly. I don't think anyone ever did. Presumably involved 80 bit instructions). Pentium Pro, K6, Pentiums 2&3, Athlon all executed "native microcodes" but don't appear to slavishly copy RISC dogma.